عکس| ساخت رباتی که میوههای رسیده را بدون آسیب میچیند
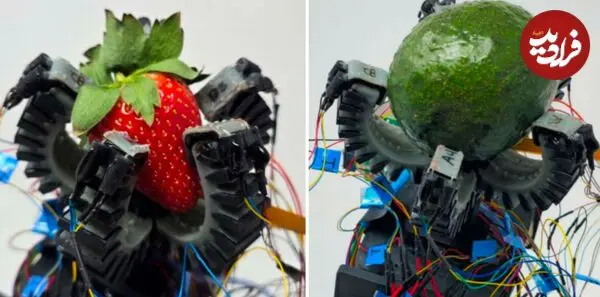
گروهی از پژوهشگران دانشگاه کرنل موفق به ساخت یک ربات نرم شدهاند که از حسگرهای فیبر نوری کشسان (نوعی حسگر انعطافپذیر مبتنیبر نور) استفاده میکند. این ربات قادر است با لمس تشخیص دهد که توتفرنگی رسیده است یا نه و سپس این میوه را بدون کوچکترین آسیبی از شاخه جدا کند.
یک فناوری جدید به رباتها امکان میدهد تا مانند انسان، میوههای رسیده را با لمس تشخیص دهد. این ربات نرم که مجهز به حسگرهای فیبر نوری کشسان است، توتفرنگی را بدون کوچکترین فشاری از ساقه جدا میکند و راه را برای کشاورزی خودکار و پایدار هموار میسازد.
وبگاه سایتِکدِیلی در گزارشی آورده است: گروهی از پژوهشگران دانشگاه کرنل موفق به ساخت یک ربات نرم شدهاند که از حسگرهای فیبر نوری کشسان (نوعی حسگر انعطافپذیر مبتنیبر نور) استفاده میکند. این ربات قادر است با لمس تشخیص دهد که توتفرنگی رسیده است یا نه و سپس این میوه را بدون کوچکترین آسیبی از شاخه جدا کند.
این فناوری در آزمایشگاه راب شفرد (Rob Shepherd)، استاد مهندسی مکانیک در کالج مهندسی دافیلد کرنل، توسعه یافته است. به گفته پژوهشگران، این دستاورد میتواند به تولید مواد غذایی مقاومتر و سازگارتر با محیطزیست کمک کند و دسترسی به گونههایی از میوه را که کشت آنها دشوار است، افزایش دهد.
نتایج این پژوهش در مجله نِیچِر کامیونیکِیشِنز/ Nature Communications منتشر شده است.

پیشینه فناوری
گروه پژوهشی شفرد پیشتر نشان داده بود که حسگرهای فیبر نوری کشسان میتوانند به سامانههای رباتیک نرم، حس لامسهای پویا و مشابه انسان بدهند. در سالهای اخیر، این گروه وارد حوزه کشاورزی هم شده است.
برای توسعه روشی جهت ارزیابی و جابهجایی دقیق میوه، گروه شفرد با ماروین پریتس (Marvin Pritts)، استاد باغبانی در کالج کشاورزی و علوم زیستی کرنل، همکاری کرد. پریتس در روشهای تولید پایدار محصولات توتفرنگی تخصص دارد.
تشخیص میوههای رسیده با لمس
شفرد توضیح داد: توتفرنگی رسیده را میتوان از روی رنگ آن تشخیص داد؛ بنابراین مدل خود را طوری آموزش دادیم که بتواند با لمس، رسیدهبودن میوه را تشخیص دهد. سپس برای اطمینان از درستی کار مدل، نتیجه لمس را با رنگ میوه مقایسه کردیم چون میدانیم که توتفرنگی رسیده قرمز است. دکتر آناند میشرا (Anand Mishra)، نویسنده اصلی مقاله، توانست به طور دقیق زمان مناسب چیدن توتفرنگی را تعیین کند. این تخمین فقط بر اساس سفتی اندازهگیریشده توسط حسگرها انجام شد.
ربات نرم به دو حسگر فیبر نوری متفاوت مجهز است: یکی از آنها خمیدگی انگشت ربات و دیگری فشار نوک انگشت آن را اندازه میگیرد. به این ترتیب، ربات میتواند شکل میوه را تخمین بزند و فشار خود را تنظیم کند تا میوه رسیده بدون آسیب برداشته شود.
شفرد در توضیح بیشتر افزود: حسگرهای بهکاررفته، همان ویژگیهای مکانیکی رباتهای نرم را دارند؛ به عبارت دیگر، خودِ جنس ربات (بدون نیاز به حسگر جداگانه) میوه را حس میکند.

میوه پاوپاو
جدا کردن میوه با پیچاندن، نه کشیدن
پژوهشگران ربات را به یک سامانه چرخدنده سیارهای (نوعی سازوکار دقیق برای انتقال حرکت چرخشی) مجهز کردهاند. پس از قرار گرفتن میوه میان انگشتان ربات، مچ ربات میچرخد و توتفرنگی را با حرکت چرخشی (پیچشی) از ساقه جدا میکند. این روش برخلاف کشیدن یا چیدن معمولی، فشاری به میوه وارد نمیکند و از آسیب به آن جلوگیری میکند.
محققان برای برطرفکردن دو چالش متفاوت، یک دوربین در کف دست ربات نصب کردهاند. چالش اول مربوط به میوههایی است که پشت برگ یا گیاهان دیگر پنهان شدهاند و دیده نمیشوند و چالش دوم مربوط به میوههایی مانند آووکادو، آناناس و پاوپاو (pawpaws) است که رسیدهبودن آنها با چشم تشخیصدادنی نیست. در هر دو حالت، دوربین محل میوه را پیدا میکند و سپس ربات با حس لمس خود، میزان رسیدهبودن میوه را تعیین میکند.
شفرد خاطرنشان کرد: مشکل میوه پاوپاو این است که با چشم نمیتوان فهمید که رسیده است یا خیر. همچنین این میوه بسیار سریع میرسد و اگر در زمان دقیق برداشت نشود، از بین میرود. به همین دلیل پاوپاو، کمتر در فروشگاههای مواد غذایی یافت میشود. این فناوری میتواند به حل این مشکل کمک کند.
کاربرد در کشاورزی پایدار
این فناوری میتواند تأثیری چشمگیر بر روشهای کشاورزی پایدار داشته باشد. شفرد توضیح داد که رباتهای کوچک و متعدد امکان کشت مخلوط گونههای مختلف را فراهم میکنند.
وی گفت: به جای اینکه یک سال سویا و سال بعد ذرت بکاریم، میتوانیم هر دو را همزمان داشته باشیم. همچنین میتوان گونههایی را با هم کشت کرد که در برابر آفات مقاومترند، از شیوع آفات جلوگیری میکنند و نیاز به سموم و کود را کاهش میدهند. مدیریت یک مزرعه به این روش بسیار پیچیده است و رباتها میتوانند این کار را برای ما ممکن کنند.
منبع: ایرنا