رباتی که از اختاپوس تقلید میکند؛ بازویی نرم با حس لامسه

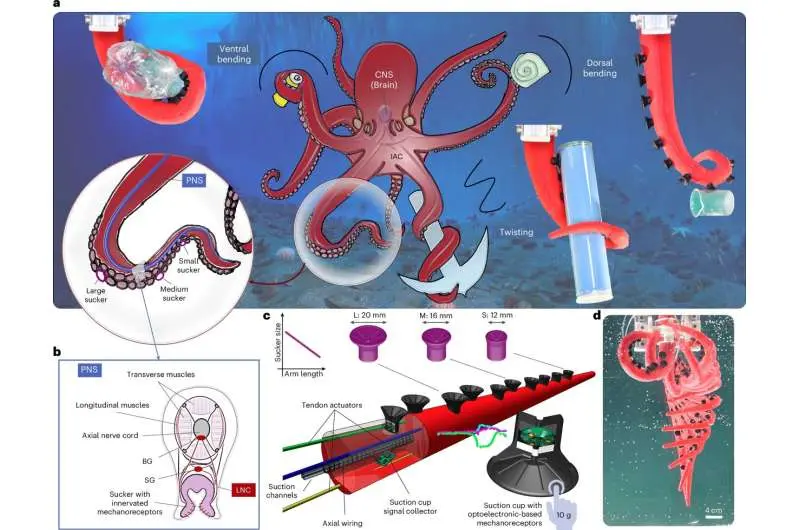
اقیانوسها منبع الهام پایانناپذیری برای رباتیک آینده هستند. پژوهشگران مؤسسه فناوری ایتالیا (IIT) بازوی رباتیک نرمی ساختهاند که از اختاپوس الهام گرفته شده است. این بازو به لطف مکندههای مصنوعی خود میتواند تماس را حس کند، شدت و جهت نیروی واردشده را تخمین بزند و اشیا را به طور خودکار، حتی در زیر آب، بگیرد.
پژوهشگران ایتالیایی بازوی رباتیک نرمی ساختهاند که از اختاپوس الهام گرفته شده است. این بازوی رباتیک با مکندههای حساس خود میتواند شدت و جهت نیرو را تشخیص دهد و اشیا را حتی در زیر آب به طور خودکار بگیرد.
وبگاه تِکاِکسپلور در گزارشی آورده است: اقیانوسها منبع الهام پایانناپذیری برای رباتیک آینده هستند. پژوهشگران مؤسسه فناوری ایتالیا (IIT) بازوی رباتیک نرمی ساختهاند که از اختاپوس الهام گرفته شده است. این بازو به لطف مکندههای مصنوعی خود میتواند تماس را حس کند، شدت و جهت نیروی واردشده را تخمین بزند و اشیا را به طور خودکار، حتی در زیر آب، بگیرد.
این مطالعه در نشریه نیچر ماشین اینتلیجنس/Nature Machine Intelligence منتشر شده و گامی مهم در زمینه رباتیک نرم محسوب میشود.
رباتیک نرم چیست؟
رباتیک نرم یعنی استفاده از مواد نرم و انعطافپذیر به جای قطعات سفت و سخت. این ویژگی به رباتها اجازه میدهد تعامل طبیعیتری با محیط و انسان داشته باشند. اختاپوس به بازوهای انعطافپذیر و مکندههای حساس خود شهرت دارد. اطلاعات در بدن این حیوان نه فقط در مغز بلکه به صورت مستقیم در خود بازوها پردازش میشود.
بازوی رباتیک چگونه کار میکند؟
این بازو به مکندههای سیلیکونی مجهز است که حسگرهای ریزی در آنها تعبیه شده است. وقتی مکنده با جسمی تماس پیدا میکند، تغییر شکل آن باعث تغییر در نور ساطعشده از حسگرها میشود. به این ترتیب، سامانه شدت و جهت نیرو را تشخیص میدهد.
اطلاعات جمعآوریشده توسط یک سامانه کنترل پردازش میشود. این سامانه هم مکندهها و هم حرکات کلی بازو (مثل خمشدن و پیچیدن) را هماهنگ میکند. ربات میتواند حتی محرکهای بسیار ضعیف را حس کند و هم در هوا و هم در زیر آب کار کند.
طراحی تغییرپذیر
امانوئلا دل دوتوره (Emanuela Del Dottore)، نویسنده اول این مطالعه، میگوید: با قرار دادن حسگرها در خود مکندهها، بازو بدون نیاز به کنترل متمرکز، در لحظه به تماس واکنش نشان میدهد. نتیجه، یک سامانه مقاوم است که برای کار در محیطهای پیچیده، از جمله زیر آب، طراحی شده است.
این سامانه بخشبندی شده (مدولار) است؛ یعنی تعداد و چیدمان مکندهها را میتوان بهراحتی بر اساس نیاز تغییر داد.
کاربردهای آینده
باربارا ماتزولای (Barbara Mazzolai)، سرپرست این پژوهش، میگوید: ما از اختاپوس الهام گرفتیم تا رباتی بسازیم که در آن حس و عمل در سراسر بدنه پخش شده است. این رویکرد به ربات اجازه میدهد تماس را تفسیر کند و چنگزنی خود را به طور خودکار و طبیعی تطبیق دهد.
این فناوری میتواند برای جابهجایی اشیای شکننده در زیر آب یا بررسی و تعمیر تجهیزات در محیطهای صنعتی دشوار (مثل سکوهای نفتی و خطوط لوله زیر آب) استفاده شود. گروه پژوهشی در تلاش است تا ظرفیت حمل بار بازو را افزایش دهد تا بازو بتواند اشیای سنگینتر و متنوعتری را بگیرد.
منبع: ایرنا